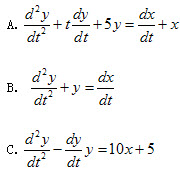
设系统微分方程为  。式中,u和y分别为系统输入和输出量。试列写可控标准型(即矩阵A为友矩阵)及可观测标准型(即矩阵A为友矩阵转置)状态空间表达式。
。式中,u和y分别为系统输入和输出量。试列写可控标准型(即矩阵A为友矩阵)及可观测标准型(即矩阵A为友矩阵转置)状态空间表达式。

 +kx=0,则描述运动的坐标ox的坐标原点应为()。
+kx=0,则描述运动的坐标ox的坐标原点应为()。 
 +=0,则描述运动的坐标o
+=0,则描述运动的坐标o  的坐标原点应为()。
的坐标原点应为()。 
设直线L的方程为

则L的参数方程是().
设直线的方程为 ,则直线()。
,则直线()。
k
 ,则此系统()。
,则此系统()。
 试用劳斯判据判断系统的稳定性。
试用劳斯判据判断系统的稳定性。
 ,它是()。
,它是()。
 求微分方程在[0,30]上的解,并画出系统轨迹。
求微分方程在[0,30]上的解,并画出系统轨迹。
 ,该系统为()。
,该系统为()。

一项病例对照研究数据如下,其OR值为()

(2010)设齐次线性方程组 ,当方程组有非零解时,k值为:()
,当方程组有非零解时,k值为:()
设A为矩阵 ,都是齐次线性方程组Ax=0的解,则矩阵A为()。
,都是齐次线性方程组Ax=0的解,则矩阵A为()。
设控制系统的开环传递函数为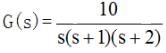 ,该系统为()。
,该系统为()。
 ,都是齐次线性方程组Ax=0的解,则矩阵A为()。
。式中,u和y分别为系统输入和输出量。试列写可控标准型(即矩阵A为友矩阵)及可观测标准型(即矩阵A为友矩阵转置)状态空间表达式。
,都是齐次线性方程组Ax=0的解,则矩阵A为()。
。式中,u和y分别为系统输入和输出量。试列写可控标准型(即矩阵A为友矩阵)及可观测标准型(即矩阵A为友矩阵转置)状态空间表达式。
 ,当方程组有非零解时,k值为:()
,当方程组有非零解时,k值为:()
免费的网站请分享给朋友吧