某工作台采用如图所示的直流电机丝杠螺母机构驱动,已知工作台的行程L=250mm,丝杠导程t=4mm,齿轮减速比为i=5,要求工作台位移的测量精度为0.005mm(忽略齿轮和丝杠的传动误差)。
(1)若采用高速端测量方法,将旋转编码器安装在电机输出轴上,确定旋转编码器的每转脉冲数。
(2)若采用低速端测量方法,将传感器与丝杠的端部直接相连,ns=500脉冲/转的旋转编码器是否合用?

图 直流电机丝杠螺母机构驱动工作台
解:工作台位移的测量精度![]() mm
mm
(1)在高速端进行测量时,传感器的每转脉冲数n =( )脉冲/转。
(2)在低速端进行测量时,以下哪种表述正确?( )。
一台工作着的列管式换热器,已知冷流体一侧的对流传热系数α1为50W/m2k,热流体一侧的对流传热系数α2等于8000W/m2.k,要提高总传热系数K,最简单有效的途径是 。

在磁场中垂直于磁场方向的通电导线,所受的安培力F跟电流I和导线长度L的乘积IL的比值,叫做磁感应强度。
设C(q)是成本函数,R(q)是收入函数,L(q)是利润函数,则盈亏平衡点是方程( )的解.
利润函数L(q)是销售量q的单调增加函数. ( )
已知电路某元件的电压u和电流i分别为u=10cos(ωt+20°)V,i=5sin(ωt+110°)A,则该元件的性质是( )。
采用步进电机驱动机床工作台,传动丝杠的导程L=2.5mm,步进电机的步距角θ=.5°,通电方式为三相六拍,工作频率是f=000Hz,求:
(1)工作台的移动速度是多少?
(2)步进电机的角速度是多少?
闭环控制的驱动装置中,丝杠螺母机构位于闭环之外,所以它的( )。
、已知某电路的输入A、B和输出Y的波形如图所示,该电路逻辑式为( )。

某平面任意力系向O点简化后,得到如图所示的一个力R和一个力偶矩为MO的力偶,则该力系的最后合成结果是( )。



当实用堰水头H大于设计水头Hd 时,其流量系数m与设计流量系数md 的关系是( )。
某工作台采用如图所示的直流电机丝杠螺母机构驱动,已知工作台的行程L=250mm,丝杠导程t=4mm,齿轮减速比为i=5,要求工作台位移的测量精度为0.005mm(忽略齿轮和丝杠的传动误差)。
(1)若采用高速端测量方法,将旋转编码器安装在电机输出轴上,确定旋转编码器的每转脉冲数。
(2)若采用低速端测量方法,将传感器与丝杠的端部直接相连,ns=500脉冲/转的旋转编码器是否合用?
图 直流电机丝杠螺母机构驱动工作台
解:工作台位移的测量精度![]() mm
mm
(1)在高速端进行测量时,传感器的每转脉冲数n =( )脉冲/转。
(2)在低速端进行测量时,以下哪种表述正确?( )。
两个三铰拱,拱高f、跨度l均相同,但荷载不同,其合理拱线也不同。
已知电路某元件的电压u和电流i分别为u=10cos(ωt+20°)V,i=5sin(ωt+110°)A,则该元件的性质是( )。
已知线性系统的输入x(t),输出y(t),传递函数G(s),则正确的关系是 。
独立的渐近线共有n-m条。
n阶系统有m个开环有限零点,则有( )条根轨迹终止于S平面的无穷远处。
当传动系统做旋转运动时,作用在电动机轴上的电磁转矩T和负载转矩TL之差,即T-TL=△T称为动态转矩,当△T>0,即dn/dt > 0时,系统处于加速运行状态。 ( )
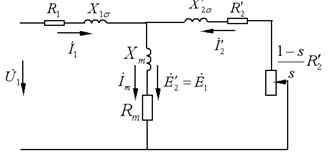
三相异步电动机的T型等效电路如图所示,m1表示电机的相数,则定子绕组的铜耗可表示为( )。
设集合A = {1, a },则P(A) = ( ).
设集合A = {1, a },则P(A) = ( ).
设集合A = {1, a },则P(A) = ( ).
设集合A = {1, a },则P(A) = ( ).
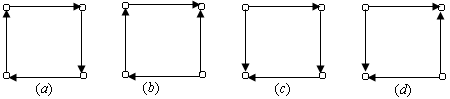
设有向图(a)、(b)、(c)与(d)如图六所示,则下列结论成立的是( ).
图六
已知一棵无向树T中有8个顶点,4度、3度、2度的分支点各一个,T的树叶数为( ).
设有向图(a)、(b)、(c)与(d)如图五所示,则下列结论成立的是( ).
图五
设G是有n个结点,m条边的连通图,必须删去G的( )条边,才能确定G的一棵生成树.
命题公式 (P∨Q)→R的析取范式是 ( ).
 图5-1
图5-1
免费的网站请分享给朋友吧