如图6-2-1所示平面机构具有确定运动时的原动件数为( )。[2010年真题]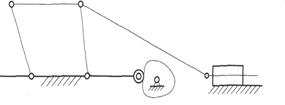 图6-2-1
图6-2-1
计算步骤如下:
①如图6-2-4所示,该机构中凸轮1通过滚子F′驱动从动推杆2,滚子F′与构件2组成的转动副为一个局部自由度,在计算机构自由度时应除去不计。为此可将滚子与推杆固结而成为同一构件。
②三个构件3、4和5在简图的同一处组成复合铰链C,其实际转动副数应为3-1=2个。
③推杆2与固定构件8在图上E和E′处组成移动副,且两移动副中心线重合。因此构成机构中的虚约束,在计算机构自由度时仅考虑一处(如图示E处)。
④机构总的活动构件数n=7,低副数PL=9,高副数PH=1。
⑤机构自由度F=3n-2PL-PH=3×7-2×9-1=2。
⑥平面机构具有确定运动的条件为:自由度数目等于原动件数,且大于0。所以本机构具有确定运动时的原动件数为2。



某注册安全工程师于2011年10月8日初始注册在某安全专业服务机构执业,根据《注册安全工程师管理规定》,该工程师应于( )前提出延续注册申请。
背景:
某实施监理的工程项目,在基础施工时,施工人员发现了有研究价值的古墓,监理机构及时采取措施并按有关程序处理了该事件。设备安装工程开始前,施工单位依据总进度计划的要求编制了如图2-1所示的设备安装双代号网络进度计划(时间单位:天),并得到了总监理工程师批准。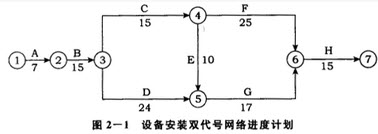
依据施工合同的约定,设备安装完成后应进行所有单机无负荷试车和整个设备系统的无负荷联动试车。本工程共有6台设备,主机由建设单位采购,配套辅机由施工单位采购,各台设备采购者和试车结果见表2-1。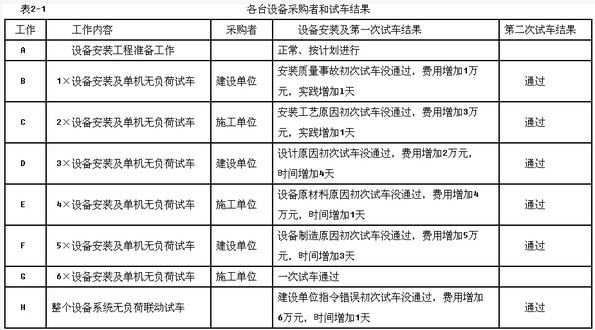
图6-2-1
免费的网站请分享给朋友吧