如图所示为二自由度机械手,已知各杆长度分别为d 1,d 2。进行机器人运动学分析的步骤有那些?结合如图所示的二自由度机械手,通过建立坐标系及坐标变换矩阵 0T 1, 1T 2等,求出机械手末端O 3点的位置和速度方程。 

 求v o。
求v o。 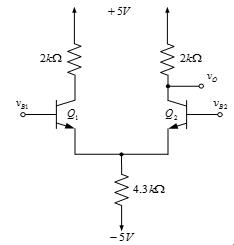

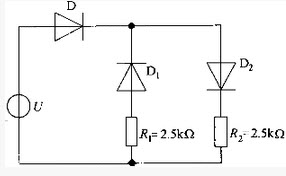
如图所示电路中,已知稳压管Dz1、Dz2的稳定电压分别为7V和7.5V,正向导通压降均为0.7V,输出电压U等于()V。
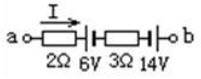


 图5-1-14
图5-1-14


 图5-1-11
图5-1-11
在2个电阻并联电路中,已知流过2个电阻的电流分别为I1和I2,则电路中总电流应为()。
如图所示电路中,已知I1=3A,I2=7A,I3=3A,请画出等效向量图。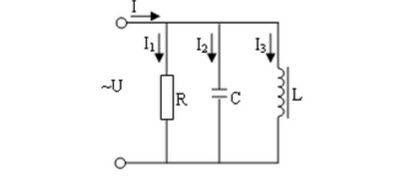
电路如图所示,D1、D2均为硅管(正向压降0.7V),D为锗管(正向压降0.3V),U=6V,如果二极管的反向电流为V,则流过D1、D2的电流分别为:()
图示结构,各杆EI=常数,截面C、D两处的弯矩值MC、MD(对杆端顺时针转为正)分别为(单位:kN·m):()
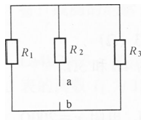
如图D-5所示,已知R1=5Ω、R2=10Ω、R3=20Ω,求电路中a、b两端的等效电阻Rab是多少?
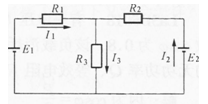
如图D-6所示,已知E1=4V,E2=2V,R1=R2=10Ω,R3=20Ω,计算电路中I1、I2、I3各等于多少?
如图所示,长管并联管段1、2,两管段直径相等d1=d2,沿程阻力系数相等,长度L1=22L。两管段的流量比Q1/Q2为:()
阶梯轴如图a)所示,已知轮1、2、3所传递的功率分别为N1=21kW,N2=84kW,N3=63kW,轴的转速n=200rad/min,则该轴的扭矩图为()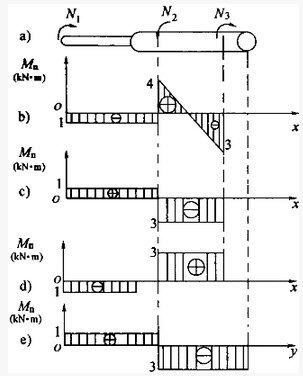
如图所示两梁中的弹性变形能分别为U1和U2,则二者的关系是()

如图a所示为()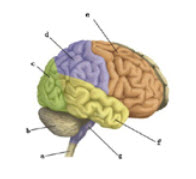
如图b所示为()
如图d所示为()
如图f所示为()
如图g所示为()


如图所示受力分析正确的是(图中各杆重量不计)()。
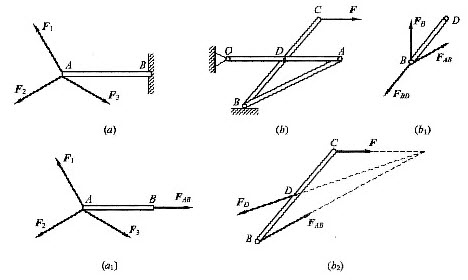
(1)图a中以AB杆为研究对象,其受力分析如图(a1)。
(2)图b中因为B点及D点皆为铰链,且B,D两点之间无外力作用,杆重不计,故AB,BD皆为二力杆,BD杆受力如图(b1)所示。
(3)图b中以BC为研究对象,由于AB为二力杆,因此由三力平衡汇交定理得D点约束力如图(b2)所示。
如图3-3所示,A、B两点的坐标分别为(20m,40m)、(40m,40m),实测两已知点到待测点P的距离D1、D2分别为12m、10m,D为20m。则由距离交会法确定的待测点P的坐标为()。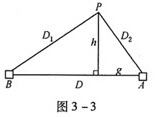
图示结构,各杆EI=常数,截面C、D两处的弯矩值Mc、Md(对杆端顺时针转为正)分别为(单位:kN·m):()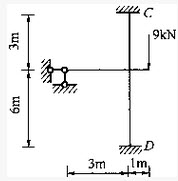
免费的网站请分享给朋友吧