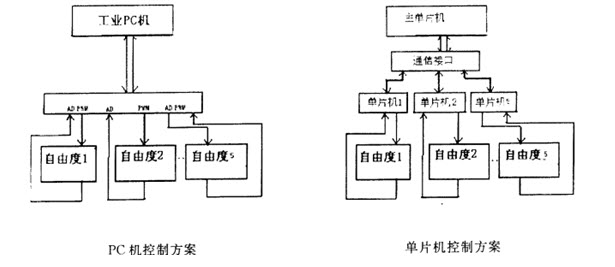
已知五自由度机器人,采用直流电机控制,关节转角的测量采用增量式编码器,具有手动示教和再现功能,试确定其控制计算机及控制方案。
刻线为1024的增量式角编码器安装在机床的丝杠转轴上,已知丝杠的螺距为2mm,编码器在10秒内输出307200个脉冲,试求刀架的位移量和丝杠的转速分别是多少?
解:(1)刀架的位移量为( )mm。
(2)丝杠的转速转速为( )转/秒。
免费的网站请分享给朋友吧