首页
题目
TAGS
首页
/
题库
/
[问答题]对(工业)机器人进行位置和力的控制时,试的答案
搜答案
对(工业)机器人进行位置和力的控制时,试比较关节空间控制器设计和操作空间控制器设计的不同点,并画出一个机器人单关节的关节空间控制器和操作空间控制器的控制系统框图。
问答题
2022-03-03 20:59
查看答案
正确答案
操作空间控制器设计时,是通过关节位置确定各关节的旋转角,必须先求出运动方程的正解,进行空间运动后,再求出运动方程的反解。而关节空间控制器设计是直接针对旋转角进行的,不需要对运动方程求正解和反解。
试题解析
标签:
大学试题
工学
感兴趣题目
在机器人伺服系统中,()可以提供机器人各个臂的位置、运动速度或力的大小信息,将它们与给定的位置、速度或力相比较,则可以得出误差信息。
机器人各执行器的驱动力或力矩为已知,求解机器人关节变量在关节变量空间的轨迹或末端执行器在笛卡尔空间的轨迹,这称为()。
以多自由度工业机器人为例,分析讨论机器人的控制: 给出操作空间及驱动空间的单个关节的机器人控制框图,并说明其控制过程。
对(工业)机器人进行位置和力的控制时,试比较关节空间控制器设计和操作空间控制器设计的不同点,并画出一个机器人单关节的关节空间控制器和操作空间控制器的控制系统框图。
已知五自由度机器人,采用直流电机控制,关节转角的测量采用增量式编码器,具有手动示教和再现功能,试确定其控制计算机及控制方案。
已知五自由度机器人,采用直流电机控制,关节转角的测量采用增量式编码器,具有手动示教和再现功能,试确定其控制计算机及控制方案。 提示:画出控制方案原理图,并作简要说明。
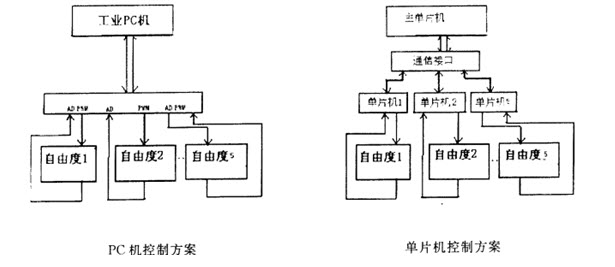
已知五自由度教学机器人,采用直流电机控制,关节转角反馈采用电位计,具有手动示教、再现功能,可以使用PC机集中控制或者分级式单片机控制,试分析比较两种控制方案的优缺点。
如何区分实物空间、虚物空间以及实像空间和虚像空间?是否可按照空间位置来划分物空间和像空间?
递归调用算法与相同功能的非递归算法相比,主要问题在于重复计算太多,而且调用本身需要分配额外的空间和传递数据和控制,所以时间与空间开销通常都比较大。
试说明对企业期间费用控制进行制度设计应注意的问题?
()、工业设计、是对人类的生存空间进行的设计。
试分析比较工业控制PC计算机与可编程序控制器的主要区别。
相关题目
人体在规定的位置上进行作业时(如操纵机器、维修设备等),必须触及的空间称为?
修建性详细规划是以城市总体规划或分区规划为依据,确定建设地区的土地使用性质和使用强度的控制指标、道路和工程管线控制性位置以及空间环境控制的规划要求。()
21[单选题,3.5分] “对设计变更进行技术经济比较,严格控制设计变更”,这项措施属于投资控制的( )。
按照控制水平分类,通用工业机器人属于()
目前大部分工业机器人都采用多少级机器人控制?( )
工业机器人常用的控制方式为()
试阐述主动、静止、被动土压力的定义和产生的条件,并比较三者的数值大小。【湖北工业大学2005年招收硕士学位研究生试题、长安大学2005、2006年硕士研究生入学考试试题(A卷)】
不同地域范围间,对“物”进行空间位移,以改变“物”的空间位置为目的的活动是()。
修建性详细规划是以城市总体规划或分区规划为依据,确定建设地区的土地使用性质和使用强度的控制指标、道路和工程管线控制性位置以及空间环境控制的规划要求。()
远程操作启闭闸门时,远程操作电脑开机,打开()界面,将现地控制和远程控制切换开关切至远程控制位置。 (
工业机器人按控制方式可分为点位控制和连续轨迹控制两类。
室内空间设计就是对建筑内部空间进行合理的()和再创造。
培训资源中培训空间的充分利用,对学习者空间位置的不同设计可以有()等。
机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?
下列关于“机器人单关节位置控制器路径点的获取方式”说法正确的是()
在机器人单关节位置控制过程中,避免运动中发生共振,要求系统阻尼()。
机器人的运动学是研究机器人末端执行器()和()与关节空间之间的关系。
机器人轨迹控制过程需要通过求解()获得各个关节角的位置控制系统的设定值。
多关节型机器人比直角坐标型机器人易于计算和控制。
以多自由度工业机器人为例,分析讨论机器人的控制:分析讨论工业机器人的位置控制、速度控制、加速度控制和力控制的特点及其区别。
广告位招租WX:84302438
题库考试答案搜索网
免费的网站请分享给朋友吧