首页
题目
TAGS
首页
/
题库
/
[填空题]按照控制方式分类,可分为()、程序机器人的答案
搜答案
按照控制方式分类,可分为()、程序机器人、示教再现机器人、智能机器人和综合机器人。
填空题
2022-03-03 20:58
查看答案
正确答案
操作机器人
试题解析
标签:
电工
动力与电气工程
感兴趣题目
中国的机器人专家从应用环境出发,将机器人分为两大类,即工业机器人和特种机器人。
按照控制方式分类,可分为()、程序机器人、示教再现机器人、智能机器人和综合机器人。
工业机器人示教运行时应选择较低的速度,机器人工作速度的()或更低,以利于其润滑和减少磨损。
以多自由度工业机器人为例,分析讨论机器人的控制:分析讨论工业机器人的位置控制、速度控制、加速度控制和力控制的特点及其区别。
以多自由度工业机器人为例,分析讨论机器人的控制: 给出操作空间及驱动空间的单个关节的机器人控制框图,并说明其控制过程。
工业机器人驱动部分在控制信息作用下提供动力,包括电动、气动、液压等各种类型的传动方式。
生产用机器设备和非生产用机器设备是按照机械设备的()来分类的。
已知五自由度机器人,采用直流电机控制,关节转角的测量采用增量式编码器,具有手动示教和再现功能,试确定其控制计算机及控制方案。
已知五自由度机器人,采用直流电机控制,关节转角的测量采用增量式编码器,具有手动示教和再现功能,试确定其控制计算机及控制方案。 提示:画出控制方案原理图,并作简要说明。
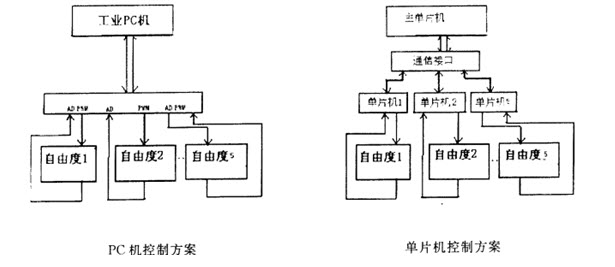
已知五自由度教学机器人,采用直流电机控制,关节转角反馈采用电位计,具有手动示教、再现功能,可以使用PC机集中控制或者分级式单片机控制,试分析比较两种控制方案的优缺点。
工业机器人有多种分类方式,下列不属于按驱动方式分类的是()。
按几何结构机器人通常有哪几种分类方式?
相关题目
按照控制水平分类,通用工业机器人属于()
在机器人动作范围内示教时, 需要遵守的事项有( )。
工业机器人常用的控制方式为()
通常对机器人进行示教编程时, 要求最初程序点与最终程序点的位置(), 可提高工作效率。
对机器人进行示教时, 作为示教人员必须事先接受过专门的培训才行 与示教作业人员一起进行作业的监护人员, 处在机器人可动范围外时,( ),可进行共同作业。
试运行是指在不改变示教模式的前提下执行模拟再现动作的功能, 机器人动作速度超过示教最高速度时, 以( )。
工业机器人按控制方式分,可分为()。
人工智能企图了解智能的实质,并生产出一种新的能以与人类智能相似的方式作出反应的智能机器.该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等,下列属于人工智能的是()。
机器人的智能和人类的智能一样的。
“机器换人”不等于“智能制造”,“机器换人”只是推进“智能制造”的()。
智能机器人是以人工智能决定其行动的机器人。
随着计算机技术和人工智能的发展,机器人正逐步走进人们的生活。回答问题人类在享受机器人带来便利的同时,也担心某一天机器人会在智能上超越人类,就像科幻电影中所描绘的:人被机器人关在“动物园”中,供机器人观赏。科幻电影表达的这种观念()
工业机器人按控制方式可分为点位控制和连续轨迹控制两类。
利用传感器获取的信息控制机器人的动作的是适应控制型机器人。
不必使机器人动作,通过数值、语言等对机器人进行示教,机器人根据示教后的信息进行作业是数控型机器人。
按机器人的应用分类,可分为()、()和()。
微程序控制器中,机器指令与()的关系是每一条机器指令由一段()编写的微程序来解释执行。
工业机器人示教运行时应选择较低的速度,机器人工作速度的()或更低,以利于其润滑和减少磨损。
用关节插补示教机器人轴时,移动命令为()。
为了确保安全,用示教编程器手动运行机器人时,机器人的最高速度限制为()。
广告位招租WX:84302438
题库考试答案搜索网
免费的网站请分享给朋友吧