正确答案
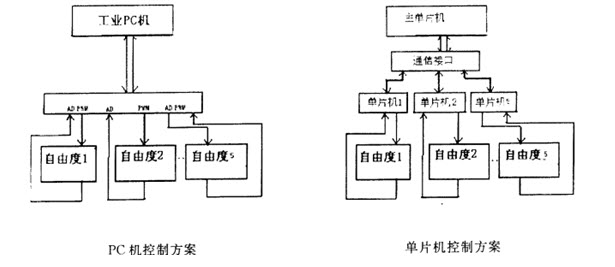
(1)PC机控制方案
已知教学机器人有五个关节,五个关节都需要时实控制,每个采样周期内完成对五路传感器信号的A/D采样、五路PWH输出和完成5个关节的控制算法。PC机的运算速度较快,存储量很大,可以胜任机器人的控制工作。
(2)双单片机主从控制方案
在主从控制方案中,主单片机的主要任务是向五个从单片机发送控制命令协调各个从单片机工作,存储示教再现的数据。要求单片机有一定的存储量和单行通讯接口,一般单片机都能胜任这项工作。关节控制单片机(从单片机)的任务是完成某一个关节的闭环伺服控制,需要单片机带有AD接口和PWM接口,同时要求单片机有行通讯接口,接受主单片机的命令,很多单片机都有这一功能。单片机主从控制方案也是可行的。
PC机的价格比较贵,AD和PWM接口卡的价格也比较高,整体价格会很高;而单片机的价格比PC机的低很多。但从这点上来讲单片机方案更好。
另外一方面,由于PC机的功能较强,存储量大,除了实现机器人的基本控制要求外还可以制作很好的人机界面等功能。因此在经费充分的条件下PC机方案更好。但从经济型考虑单片机方案比较好。
试题解析