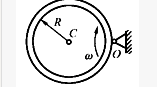
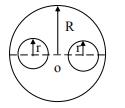
]图中均质细圆环质量为m,半径为R,可绕环上O点并垂直于圆环平面的轴转动。已知角速度为w,顺时针转向,试求圆环对O轴的动量矩的大小及转向()
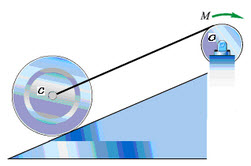
已知:轮O的半径为R1,质量为m1,质量分布在轮缘上;均质轮C的半径为R2,质量为m2,与斜面纯滚动,初始静止。斜面倾角为θ,轮O受到常力偶M驱动。求:轮心C走过路程s时的速度和加速度。
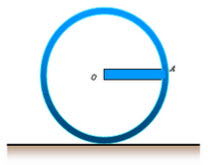
已知:如图所示均质圆环半径为r,质量为m,其上焊接刚杆OA,杆长为r,质量也为m。用手扶住圆环使其在OA水平位置静止。设圆环与地面间为纯滚动。求:放手瞬时,圆环的角加速度,地面的摩擦力及法向约束力。
半径为R,质量为m的均质圆盘在其自身平面内作平面运动。在图示位置时,若已知图形上A、B两点的速度方向如图所示。a=45°,且知B点速度大小为vb。则圆轮的动能为()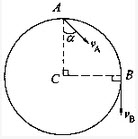




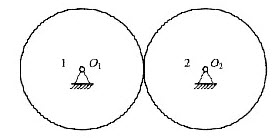
在下图中,若两轮的转动惯量皆为J,质心都在各自转轴上,轮1半径为R,轮2半径为r且R>r,两轮接触处无相对滑动,轮1的角速度为ω。下述各说法正确的是()。


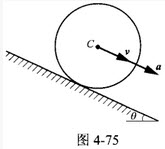
半径为R、质量为m的均质圆轮沿斜面作纯滚动如图4-75所示。已知轮心C的速度为ν、加速度为a,则该轮的动能为()。
执行以下指令后:
MOV AL,2BH
OR AL,0FH
AL的内容为:()
执行以下指令后:
MOV AL,56H
OR AL,0FH
AL的内容为:()
质量为m1,半径为r的均质圆盘上,沿水平直径方向焊接一长为 ,质量为m2的均质杆AB。整个物体绕圆盘中心O以角速度w转动,该物体系统的总动量的大小为()。
,质量为m2的均质杆AB。整个物体绕圆盘中心O以角速度w转动,该物体系统的总动量的大小为()。
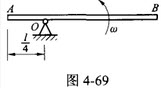
均质细直杆AB长为ι,质量为m,以匀角速度ω绕O轴转动,如图4-69所示,则AB杆的动能为()。
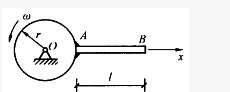
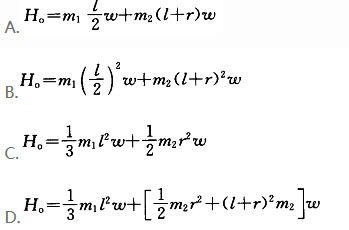
长为L,质量为m1的均质杆OA的A端焊接一个半径为r,质量为m2的均质圆盘,该组合物体绕O轴转动的角速度w,则系统对O轴的动量矩H。()。
如图4-65所示,忽略质量的细杆OC=ι,其端部固结均质圆盘。杆上点C为圆盘圆心。盘质量为m。半径为r。系统以角速度ω绕轴O转动。系统的动能是()。

质量为2m,半径为R的偏心圆板可绕通过中心O的轴转动,偏心距OC=R/2。在OC连线上的A点固结一质量为m的质点,OA=R如图示。当板以角速度w绕轴O转动时,系统动量K的大小为()。(注:C为圆板的质心)。

图示均质圆轮,质量为m,半径为r,在铅垂平面内绕通过圆盘中心O的水平轴转动,角速度为ε,此时将圆轮的惯性力系向O点简化,其惯性力系主矢和惯性力系主矩的大小分别为()。
]图中均质细圆环质量为m,半径为R,可绕环上O点并垂直于圆环平面的轴转动。已知角速度为w,顺时针转向,试求圆环对O轴的动量矩的大小及转向()
半径为R、质量为m的均质圆盘绕偏心轴O转动,偏心距e=R/2,图示瞬时转动角速度为ω,角加速度为ε,则该圆盘的惯性力系向O点简化的主矢量R1和主矩的大小为()。

质量为m,半径为R的均质圆盘,绕垂直于图面的水平轴O转动,其角速度为w,在图示瞬时,角加速度为零,盘心C在其最低位置,此时将圆盘的惯性力系向O点简化,其惯性力主矢和惯性力主矩的大小分别为:()
图示均质圆轮,质量为m,半径为r,在铅垂图面内绕通过圆盘中心O的水平轴转动,角速度为w,角加速度为ε,此时将圆轮的惯性力系向O点简化,其惯性力主矢和惯性力主矩的大小分别为:()

图示均质轮和均质杆,质量均为m;轮子半径均为R,杆长均为l;轮和杆均以角速度ω转动,其中图B中,轮在直线轨道上作纯滚动,则它们的动量大小按图次序为()。

免费的网站请分享给朋友吧