已知系统频率特性为  ,当输入为x(t)=sin2t时,系统的稳态输出为()
,当输入为x(t)=sin2t时,系统的稳态输出为() 

 ,当输入为x(t)=sin2t时,系统的稳态输出为()
,当输入为x(t)=sin2t时,系统的稳态输出为()
 ,当输入为
,当输入为  时,系统的稳态输出为()。
时,系统的稳态输出为()。 
 ,当输入为x(t)=sin2t时,系统的稳态输出为()
,当输入为x(t)=sin2t时,系统的稳态输出为() 
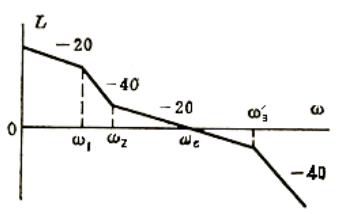
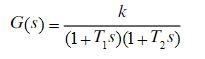 写出系统的幅频特性和相频特性的表达式。
写出系统的幅频特性和相频特性的表达式。



为减少机械传动部件的扭矩反馈对电机动态性能的影响,机械传动系统的基本固有频率应低于电气驱动部件的固有频率的2~3倍,同时,传动系统的固有频率应接近控制系统的工作频率,以免系统产生振荡而失去稳定性。( )
机械的可靠性设计原则主要包括:使用已知可靠性的组件、关键组件安全性冗余、操作的机械化自动化设计、机械设备的可维修等四原则。关于这四项原则及其对应性的说法,错误的是( )。
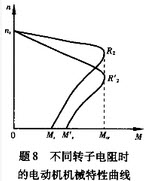
图中所示曲线表示异步电动机供电频率为f1、f2、f3时的机械特性曲线组,f1、f2、f3的关系为()。

免费的网站请分享给朋友吧