图示质量为m、长为l的杆OA以的角速度绕轴O转动,则其动量为:() 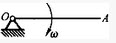





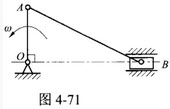


如图4-71所示曲柄连杆机构中,OA=r,AB=2r,OA、AB及滑块B质量均为m,曲柄以ω的角速度绕O轴转动,则此时系统的动能为()。
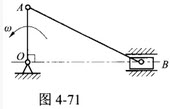

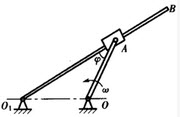
科氏加速度)如图所示平面机构,AB长为l,滑块A可沿摇杆OC的长槽滑动。摇杆OC以匀角速度ω绕轴O转动,滑块B以匀速ν═lω沿水平导轨滑动。图示瞬时OC铅直,AB与水平线OB夹角为30º。求:此瞬时AB杆的角速度及角加速度。


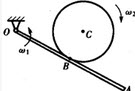
图示杆OA以角速度ψ1绕O轴旋转,轮C相对杆以角速度ω2在杆上滚动。轮半径为R,杆长为2l,此瞬时OB=BA。若以轮心C为动点,动系固结在OA杆上,则C点的牵连速度vE为()。
质量为m,长度为 的均质杆铰接于O点,A端固结一质量为m的质点如图示。当OA杆以角速度w绕O轴转动时,系统对轴O的动量矩的大小为()。
的均质杆铰接于O点,A端固结一质量为m的质点如图示。当OA杆以角速度w绕O轴转动时,系统对轴O的动量矩的大小为()。

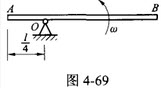
均质细直杆AB长为ι,质量为m,以匀角速度ω绕O轴转动,如图4-69所示,则AB杆的动能为()。
图示平面机构,曲柄OA长R,以角速度ω绕O轴转动,并通过杆端滑块A带动摆杆O1B绕O1轴转动。已知OA=OO1,图示位置=300,则此时杆O1B的角速度为()。
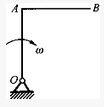
长为L,质量为m1的均质杆OA的A端焊接一个半径为r,质量为m2的均质圆盘,该组合物体绕O轴转动的角速度w,则系统对O轴的动量矩H。()。
如图4-65所示,忽略质量的细杆OC=ι,其端部固结均质圆盘。杆上点C为圆盘圆心。盘质量为m。半径为r。系统以角速度ω绕轴O转动。系统的动能是()。

质量为2m,半径为R的偏心圆板可绕通过中心O的轴转动,偏心距OC=R/2。在OC连线上的A点固结一质量为m的质点,OA=R如图示。当板以角速度w绕轴O转动时,系统动量K的大小为()。(注:C为圆板的质心)。

半径为R、质量为m的均质圆盘绕偏心轴O转动,偏心距e=R/2,图示瞬时转动角速度为ω,角加速度为ε,则该圆盘的惯性力系向O点简化的主矢量R1和主矩的大小为()。

均质直角曲杆OAB的单位长度质量为ρ,OA=AB=2l,图示瞬时以角速度ω、角加速度a绕轴O转动,该瞬时此曲杆对O轴的动量矩的大小为:()
如图所示,均质杆OA,重为P,长为l,可在铅直平面内绕水平固定轴O转动。杆在图示铅直位置时静止,欲使杆转到水平位置,则至少要给杆以角速度ω为()。





 ,其端部固结匀质圆盘。杆上点C为圆盘圆心,盘质量为m,半径为r。系统从角速度ω绕轴O转动,系统的动能是()。
,其端部固结匀质圆盘。杆上点C为圆盘圆心,盘质量为m,半径为r。系统从角速度ω绕轴O转动,系统的动能是()。 
免费的网站请分享给朋友吧