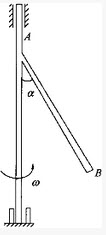
图示均质细杆AB长L,重力的大小为P,与铅垂轴固结成角a=30°,并以匀角速度ω转动,则惯性力系的合力的大小等于()
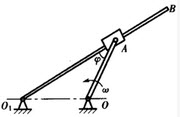
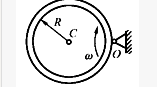
图示平面机构,曲柄OA长R,以角速度ω绕O轴转动,并通过杆端滑块A带动摆杆O1B绕O1轴转动。已知OA=OO1,图示位置=300,则此时杆O1B的角速度为()。
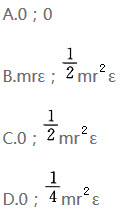
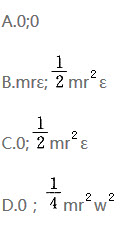
图示均质圆轮,质量为m,半径为r,在铅垂平面内绕通过圆盘中心O的水平轴转动,角速度为ε,此时将圆轮的惯性力系向O点简化,其惯性力系主矢和惯性力系主矩的大小分别为()。
]图中均质细圆环质量为m,半径为R,可绕环上O点并垂直于圆环平面的轴转动。已知角速度为w,顺时针转向,试求圆环对O轴的动量矩的大小及转向()
半径为R、质量为m的均质圆盘绕偏心轴O转动,偏心距e=R/2,图示瞬时转动角速度为ω,角加速度为ε,则该圆盘的惯性力系向O点简化的主矢量R1和主矩的大小为()。

如图所示,均质杆OA,重为P,长为l,可在铅直平面内绕水平固定轴O转动。杆在图示铅直位置时静止,欲使杆转到水平位置,则至少要给杆以角速度ω为()。

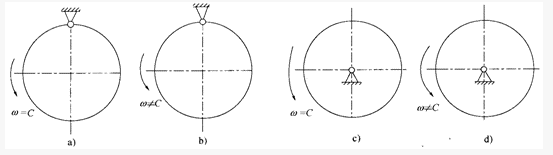
图示均质圆盘作定轴转动,其中图a)、c)的转动角速度为常数(w=C),而图b)、d)的角速度不为常数(w≠C),则哪个图示圆盘的惯性力系简化的结果为平衡力系?()
图示均质圆轮,质量为m,半径为r,在铅垂图面内绕通过圆盘中心O的水平轴转动,角速度为w,角加速度为ε,此时将圆轮的惯性力系向O点简化,其惯性力主矢和惯性力主矩的大小分别为:()

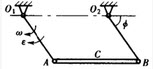
图示机构O1ABO2为一平行四边形,O1A=O2B=R,O1O2=AB=l,在该瞬时杆O1A绕O1轴的角速度为ω,角加速度为ε,则质量为m的均质杆AB的惯性力系向其质心C简化的主矢量R1和主矩的大小分别为()。
图示均质轮和均质杆,质量均为m;轮子半径均为R,杆长均为l;轮和杆均以角速度ω转动,其中图B中,轮在直线轨道上作纯滚动,则它们的动量大小按图次序为()。

质量为m,长为2 的均质细杆初始位于水平位置,如图所示。A端脱落后,杆绕轴B转动,当杆转到铅垂位置时,AB杆角加速度的大小为()。
的均质细杆初始位于水平位置,如图所示。A端脱落后,杆绕轴B转动,当杆转到铅垂位置时,AB杆角加速度的大小为()。


 题57图
题57图
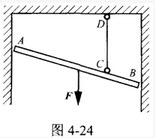
图4-24中,均质杆AB重力为F,用铅垂绳CD吊在天花板上,A、B两端分别靠在光滑的铅垂墙面上,则A、B两端约束力的大小是()。
图示平面机构,半径为R的圆轮在水平直线轨道上作纯滚动,图示位置=60°,轮心A的速度为v,杆AB长l,B端紧靠铅直墙,则此瞬时B点速度vB和杆AB的角速度应为()。

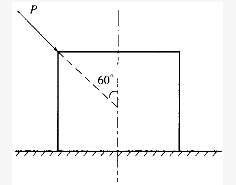
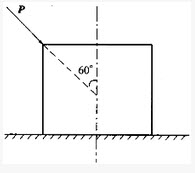
物块重力的大小为5kN,与水平面间的摩擦角为φm=35°。今用与铅垂线成60°角的力P推动物块(如图所示),若P=5kN,则物块是否滑动?()
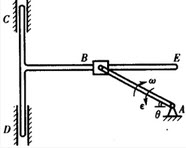
在图示平面机构中,AB杆借助滑套B带动直角杆CDE运动,在图示位置,θ=30°,角速度ω=2rad/s,角加速度ε=1rad/s2,且知曲柄AB长L=10cm,则该瞬时D点的速度V和加速度a为()。
偏心凸轮机构,偏心距为e,轮半径R=e,轮转动时将推动AB杆绕A轴转动。图示位置,OC⊥CB,OB在铅直位置,此时轮的角速度为ω,杆AB水平,B端搁置缘上,杆长为L,则此瞬时杆AB的角速度应为()。

质量为m1,半径为r的均质圆盘上,沿水平直径方向焊接一长为 ,质量为m2的均质杆AB。整个物体绕圆盘中心O以角速度w转动,该物体系统的总动量的大小为()。
,质量为m2的均质杆AB。整个物体绕圆盘中心O以角速度w转动,该物体系统的总动量的大小为()。
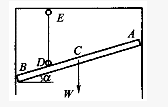
(2011)均质杆AB长为ι,重为W,受到如图所示的约束,绳索ED处于铅垂位置,A、B两处为光滑接触,杆的倾角为α,又CD=ι/4,则A、B两处对杆作用的约束力大小关系为:()
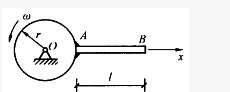
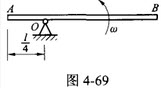
均质细直杆AB长为ι,质量为m,以匀角速度ω绕O轴转动,如图4-69所示,则AB杆的动能为()。
图示均质细杆AB长L,重力的大小为P,与铅垂轴固结成角a=30°,并以匀角速度ω转动,则惯性力系的合力的大小等于()
图示结构杆①的轴力大小为:()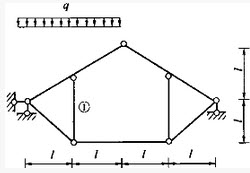
图示结构杆①的轴力大小为:()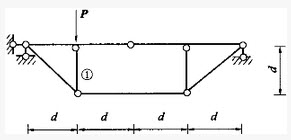
铅垂面的H面投影为直线,有积聚性,且反映( )夹角大小。
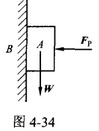
图4-34所示物块A重力的大小W=10N,被用大小为FP=50N的水平力挤压在粗糙的铅垂墙面B上,且处于平衡。块与墙间的摩擦系数f=0.3。A与B间的摩擦力大小为()。
物块重力的大小为5kN,与水平面间的摩擦角为φn=35°。今用与铅垂线成60°角的力P推动物块(如图所示),若P=5kN,则物块是否滑动?()
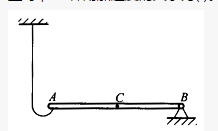
图示杆件AB长2m,B端受一顺时针向的力偶作用,其力偶矩的大小m=100N·m,杆重不计,杆的中点C为光滑支承,支座A的反力FA的大小和方向为:()
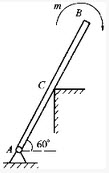
图示杆件AB长2m,B端受一顺时针向的力偶作用,其力偶矩的大小m=100N·m,杆重不计,杆的中点C为光滑支承,支座A的反力FA的大小和方向为:()
免费的网站请分享给朋友吧